Trusted Platform Module as the Silicon RoT
Trusted Platform Module(TPM) supports many crypto functions, and notably the “PCR Extend” and “Seal” operations are used to build this solution.
TPM can be asked to perform a “PCR Extend” command, where a particular hash value would be added to the existing hash value in a Platform Configuration Register(PCR), and the resultant hash value can be stored back in the same PCR. i.e.
PCR_Content = PCR_Content || New_Measurement
One can only extend the current value in the PCR with a new hash value, and the existing contents can not be overwritten. This provides us these key capabilities:
- The order of measurements - Final value will be the same if and only if the measurements are done in the same order
- Final PCR value captures the whole history of measurements - useful in quick validation of final states against expected state
- Deterministic - If one repeats the same history of measurements, he will end up in the same final PCR value - Useful in validation of a change in one of the input sequences
TPM can seal a given secret information against the current set of PCR values, through a TPM command called “Seal”. Once sealed, the information can be read back only through an unseal command, which will succeed only if those PCRs hold the same set of values as they were during the sealing operation. In other words, if those PCR values aren’t the same, the secret can not be recovered.
Using these two TPM capabilities, one can build powerful solutions to measure and validate the software state of a given system. The measuring process is called Measured Boot, and the method of getting the measurements verified and attested through a third-party is called Remote Attestation
Measured Boot is a method where each of the software layers in the booting sequence of the EVE node, measures the layer above that, and extends the value in a designated PCR. e.g. BIOS measures various components of Bootloader and stores these values in PCRs 0-7. Likewise, bootloaders can measure the Linux kernel and store the measurements in PCRs 8-15. The Linux kernel has a feature called Integrity Measurement Architecture (IMA), where various kernel executables/drivers can be measured and stored in PCR 10.
During these extend operations, the extend operations are recorded by BIOS and Bootloader, in a special firmware table, called the TPM Eventlog table, and this table is handed over to the operating system during OS takeover. By playing the same sequence of extend operations recorded in a given TPM Event Log, one can check if the final PCR values match, and if so, then the Event Log(and hence the software layers) can be trusted.
Based on the above constructs, we present a solution to measure and attest software integrity of EVE node. Just for recap, EVE is the open-source software from LF-Edge for Edge Virtualization, running on IoT Edge gateways. EVC is the controller for managing these EVE instances. ZedCloud is a commercial offering of one such EVC implementation from ZEDEDA. In this context, the EVC is the attesting authority and EVE reports its measurements for attestation.
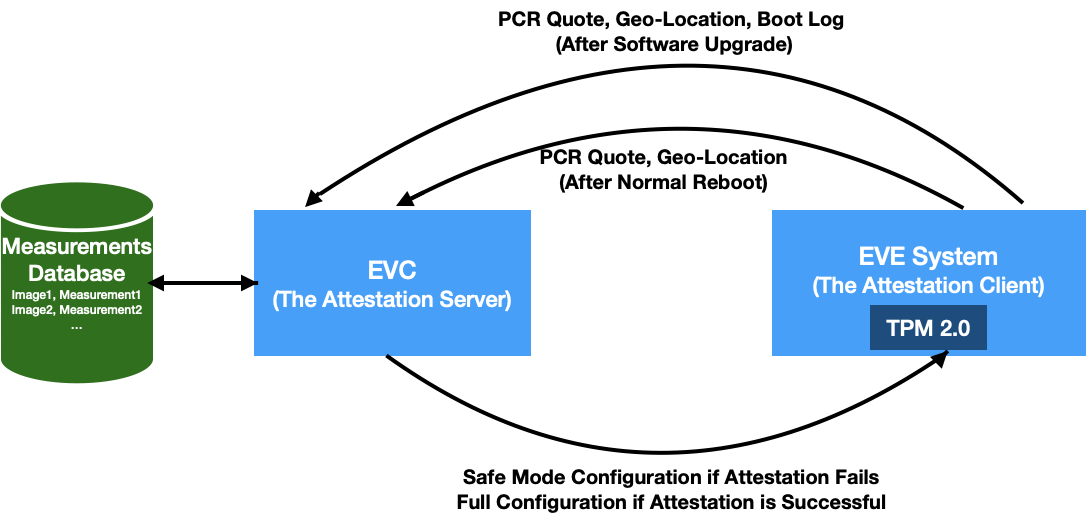
Fig1. Role of ZedCloud as the Remote Attestation Server
Solution Overview
- To identify if the software running on EVE node is the intended software, a new device flag, “Unknown Update Detected” (Abbreviated as UUD) will be introduced in EVC, to indicate to the user that software running on a given device is not one of the intended/certified images
- Another new device flag, “Unknown Movement Detected” (Abbreviated as UMD) will be introduced in EVC, to indicate that a change in the location of the device has been detected. This will be an optional “Location-Lock” feature. Admin can enable this feature if the EVE node is not a mobile device, and the location for the same is not expected to change (Geo location of the EVE node has been changed since last(indicating a potential physical compromise)
- Device reports PCR Quote/Geo-Location value along with config request (with an appropriate nonce, to force the quote to be current)
- EVC maintains a central database of all the supported EVE software images, and their hash values, indexed with the EVE image version tag
- EVC also maintains a central database of all the BIOS firmware images, their signatures, and the certificate provided by the BIOS vendor for validating the signatures, indexed by a combined tag of BIOS version string + Manufacturer
- After normal reboot operation of EVE, EVC checks PCR Quote against the baseline value. If there is a change, the edge-node is marked as “UUD”.
- After EVE software upgrade, it is expected that the baseline value will change for the PCR values. However, after comparing the reported values with the expected values(since EVC knows about the new image version and its hash values), EVC makes a decision: If the reported values match, the baseline for the EVE node is updated. If they don’t, it is a UUD detection.
- If edge-node is in “UUD” state, only the “last-seen” EVE configuration, along with the latest baseOS configuration is sent as config request response, all other new configuration items will be omitted in config response. This is to protect any new sensitive images/credentials from getting exposed to the compromised device.
- If EVE node is not in “Unknown Update Detected” state, all the latest configuration items are included.
- Optionally, if administrator enables “Location-Lock” feature, Geo-Location of the device will also be included in the checks, before sending the latest configuration.
- EVE node will be required to periodically attest itself via attestation requests. The interval is fixed to be every 4 hours, or whenever the device connects back to the cloud again, whichever is earlier.
- Also, for every configuration request, EVE node is required to send a token string, known as “Integrity Token”. This token is sent during attestation requests, and if the attestation is successful, the provided token value is locked against the EVE node. EVE node is required to keep this token under /persist/vault, and produce this token with every config request.
- If there is a token mismatch, HTTP code 401 - Unauthorized will be sent to the device as the response, indicating that device should do re-attestation. This mechanism is put in place as a quick check against the software state. By storing the token inside a secure folder with key sealed against PCR values, if EVE fails to produce this token, one can consider this as a condition to re-trigger full attestation immediately, instead of waiting for the next 4-hour slot for regular attestation.
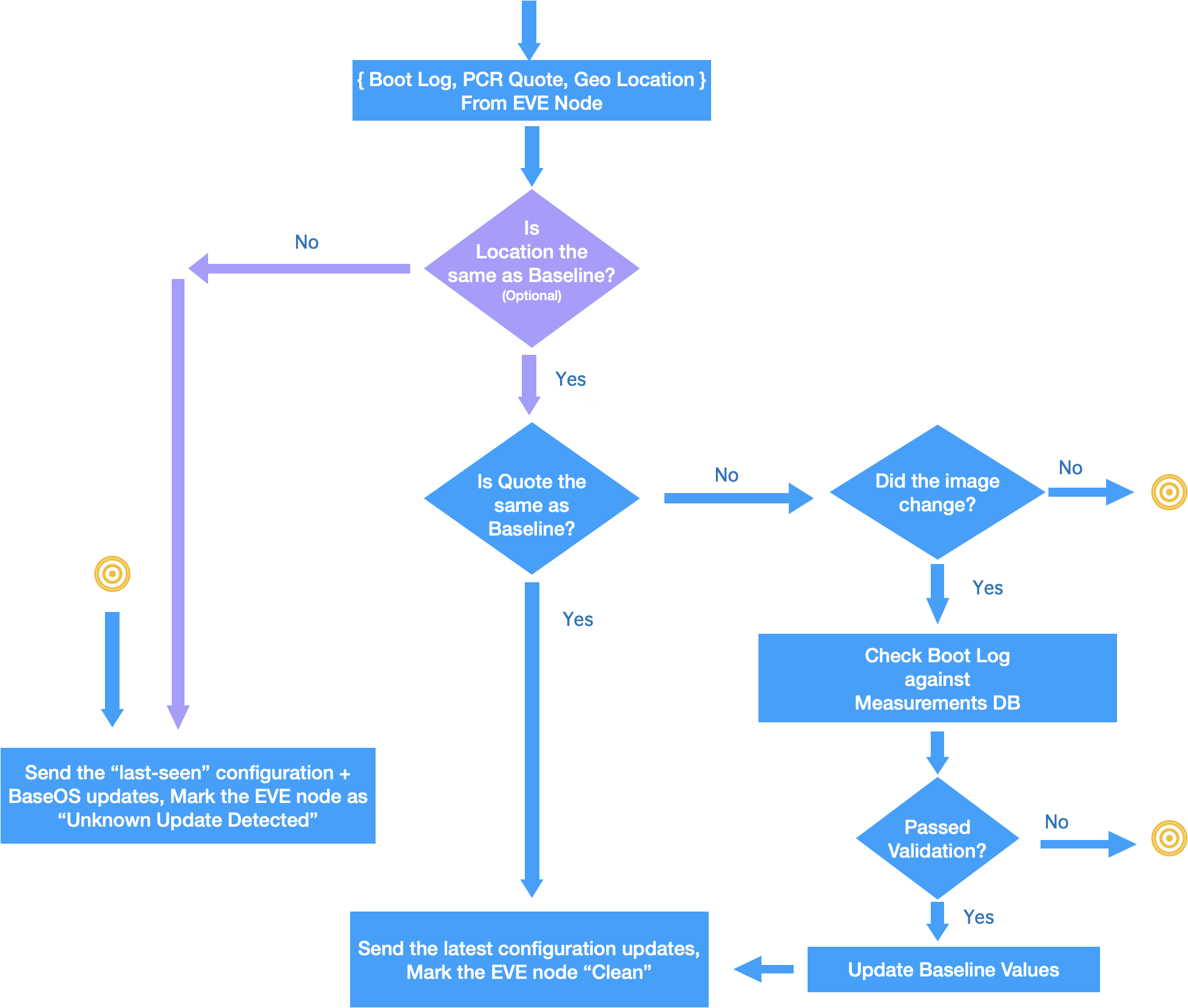
Fig 2. Remote Attestation Flow in EVC
Protecting App Instances using TPM Sealing
All the app images and container volumes would be inside the encrypted folder (/persist/vault), with the master key sealed inside TPM, against a set of PCR values. Without access to this master-key, the encrypted folders can not be accessed.
If EVE or BIOS image was changed during boot, then unsealing will fail, which will implicitly disable all the apps from getting launched, since all the app images and container volumes would be inside the encrypted folder (/persist/vault), with the master key sealed inside TPM.
To provide some flexibility to the EVE node administrator, when deploying app instances on the EVE platform, there will be 3 security modes for app deployment:
- No-Lock Mode - app images will not be in encrypted folder (not recommended, unless there is a compelling need to run any app instance unconditionally e.g. service apps like SD-WAN, DHCP Server)
- Software Lock Mode - app images will be in encrypted folder - with key from TPM, sealed with PCRs (the default option)
- Software Lock + Location Lock Mode - app images will be encrypted folder - with key from TPM, sealed with PCRS + a key provided after Geo-Location check from the EVC. This will work only when device is connected to EVC
Offline vs. Online checks
With the approach to seal the key(s) needed for fscrypt under the TPM, this means that if the PCR values have not changed (e.g., a normal reboot, or a reboot due to a power outage) the EVE node will be able to unseal those keys and start the app instances without any controller connectivity.
After a BIOS and/or EVE update, the PCR values will presumably change so the unsealing will fail. In that case the EVE node needs to perform remote attestation with the controller (with automatic and/or user acceptance of the new measurements) before it can retrieve the key from the controller. Note that as part of EVE update we already require this connectivity to verify that the update is fully working. Once retrieved the EVE node will again seal that key under the current PCR values.
This means that the controller will need to store the fscrypt key(s) so it can hand it back to the EVE node. But we should be able to encrypt them under the EVE node private key so that even if the controller is compromised the fscrypt keys can not be extracted from it.
The offline approach means that if there is something else wrong, such as IP geolocation doesn’t match, the applications are likely to start before the controller can raise a flag and potentially disable the applications.
And since this is measured boot it means that if some firmware or EVE component has been compromised, EVE will still boot and attempt remote attestation. Such a compromised device might be running some root-kit which can access the adapters on the EVE node, but applications will not start. Thus this implicitly assumes that the security of connected systems is based on credentials stored in the application instances and not merely by having the physical connectivity to some serial port or Ethernet network.
Establishment of Baseline
- To establish a baseline, the following is proposed:
EVE device is onboarded in a trusted environment, usually in a manufacturing/supply chain setup (or Intel SDO) - When EVE is onboarded for the first time, during device-certificate registration, the PCR values coming out of the EVE node will be taken as the baseline for that device. Any change in the PCR value (other than during an EVC-driven upgrade, explained below) after will be flagged as UUD, and unless the user marks it as legal/accepted, the EVE node will remain in the UUD state.
- If the enterprise account is a manufacturing account, then geo-location will be exempted in calculating the baseline.
- When the EVE node comes online for the first time in a non-manufacturing enterprise, geo-location of the EVE node will be taken and will be frozen as the baseline value for geo-location.
- In case of mobile gateways, there will be an option to turn-off Geo-Fencing(i.e. Locking of Geo location)
Securely Upgrading EVE Software
When EVE goes through a software upgrade, the PCR values might change depending on what is new in the upgraded version. However, during the upgrade window, an attacker might boot a different software as well, and try to present the compromised software as the upgraded version of EVE. Therefore, it is important that we measure the boot sequence after the upgrade and validate that the new software is indeed the new image that was pushed by the EVC. This is done through the following steps:
- Before the upgrade, EVE retrieves the master-key for the vault, and encrypts it using its TPM-based private-key, and uploads it to the EVC, and deletes the master-key from TPM.
- After the upgrade, the EVE software presents the new Event Log, along with the PCR Quote. As mentioned earlier, the PCR Extend operations are recorded in a table called TPM Event Log Table. This is sometimes also called the Boot Log.
- First, EVC repeats the transactions mentioned in the Event log, and the final PCR as computed from the Event Log should match the PCR Quote. If they don’t match, then Event Log can’t be trusted(say it was manipulated), and the EVE node is marked as UUD. Please note: Event Log is stored in system memory and PCR Quote is generated by TPM. So PCR quote is the source of truth, pinned to HRoT.
- Secondly, if PCR Quote matches the Event Log, then Event Log entries are compared between old Event Log and the new Event Log, and the differing entries are extracted
- EVC maintains a central database of all the supported EVE software images, and their hash values, indexed with the EVE image version tag
- EVC also maintains a central database of all the BIOS firmware images, their signatures, and the certificate provided by the BIOS vendor for validating the signatures, indexed by a combined tag of BIOS version string + Manufacturer
- The differing values are compared against acceptable values stored against the given image version
- If there is a match, the encrypted master-key is given back to the EVE node. EVE decrypts the master-key, and unlocks the vault with the master-key. The master-key is now sealed into the TPM, against the current PCR values. If admin has enabled “Location-Lock” feature, additionally the geo-location reported by the device is checked as well. The Geo-location reported by the device can be trusted if the software state (established through PCR quote) can be trusted
- User will have an option to override the attestation decision taken by EVC, through a configuration in EVC portal, against the EVE node
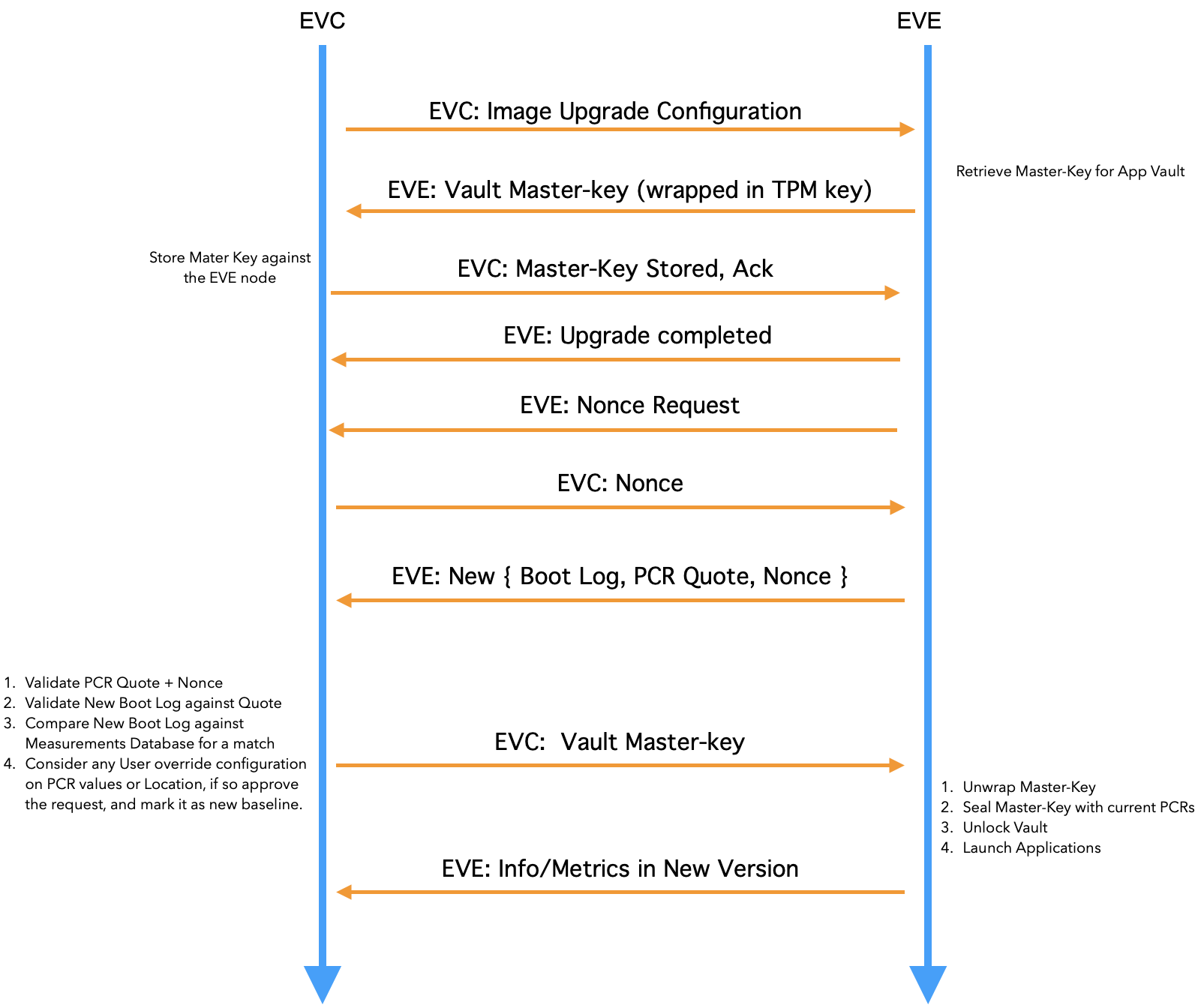
Fig 3. Flow of events during Secure Software Update
Managing Firmware Upgrades
While the workflow is almost the same for securely upgrading firmware on EVE, the following additional steps are required:
- BIOS/Firmware updates can be done either manually (say a person inserts USB drive with new firmware and updates it out-of-band, and reboots the device with new firmware) or can be done remotely (updates driven through remote management framework, without a physical access to the EVE node). In both the cases, the new firmware version needs to be validated by EVC, before approving the new software state.
- In case of remote updates, firmware Upgrades will be driven through EVC. This is to make sure EVC has the access to the firmware image, the measurement values to expect from EVE node for this firmware version etc.
- To this effect, EVC would maintain a central database of all the BIOS firmware images, their signatures, and the certificate provided by the BIOS vendor for validating the signatures, indexed by a combined tag of BIOS version string + Manufacturer
- EVC will communicate the upgrade to a dedicated agent for this purpose on EVE.
- The Firmware upgrade agent can either be a EVE service or can be a service app deployed on EVE
- The agent will have a platform abstraction layer and a platform dependent layer.
- The platform abstraction layer drives the overall logic of downloading the firmware image, validating the image using manufacturer certificates, and reporting the status back to EVC
- The platform dependent layer will be responsible for the actual firmware upgrade, by talking to any special component on the EVE hardware, like BMC
- To address out-of-band update of firmware, there will be an option provided in the EVC portal, where the admin (after the upgrade is done), can configure EVC to accept the new firmware as trusted.
- If this is a general update across many devices, admin can also configure EVC database to feed in the new hash values to expect from the new firmware version. Please note, this is almost the same as remote update workflow w.r.t. validating the new version, except that the image update is done out-of-band
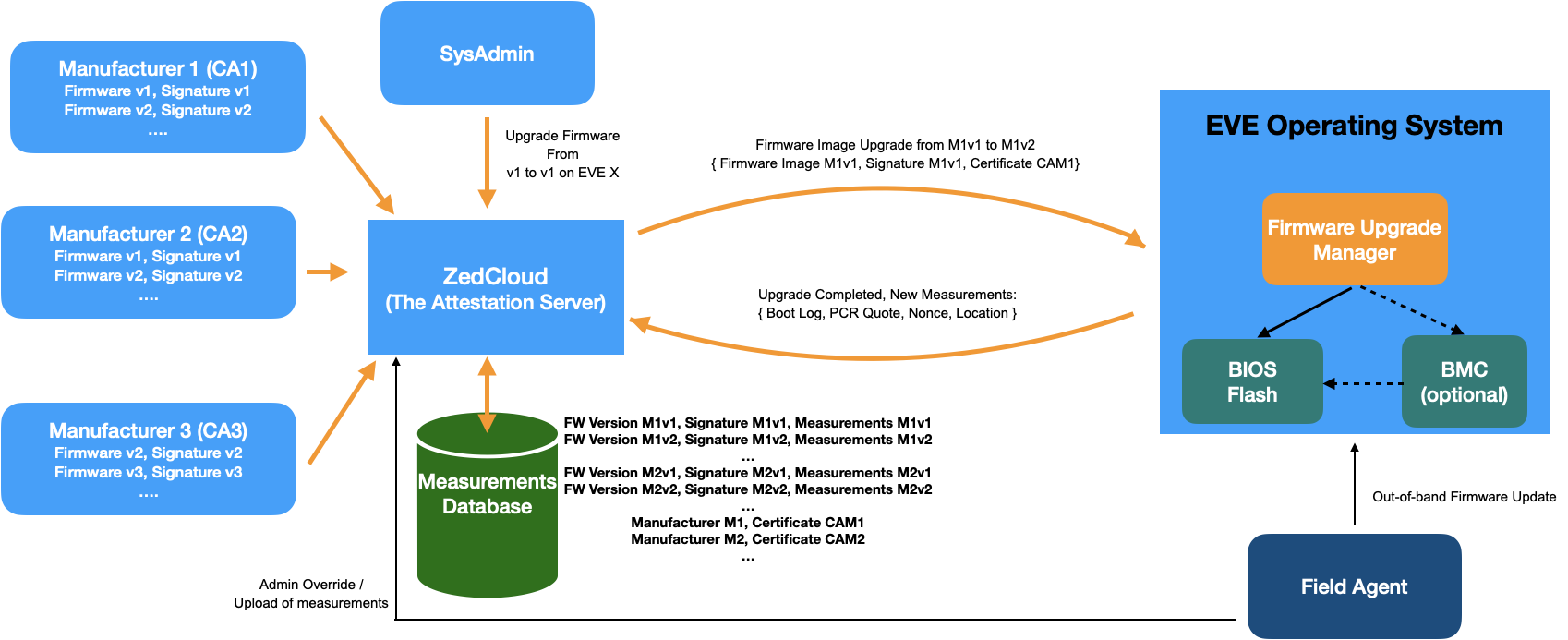
Fig 4. Firmware Upgrade Management